Построение плана ограничения и устранения препятствий |




|
|
Планирование мероприятий по устранению препятствий заключается в определении перечня объектов, выступающих за поверхности ограничения препятствий. Методика построения описана в приложении 3.5 МОС ФАП. Планы поверхностей используются при оценке допустимости строительства в районе аэродрома новых и увеличения высоты существующих препятствий. На каждом аэродроме подготавливается план внутренней горизонтальной и конической поверхностей. План строится из одного или нескольких планов в зависимости от количества направлений захода на посадку по приборам. Планы могут объединяться средствами ГИС «Панорама» или анализироваться по раздельности.
Форма конической поверхности с включенной базой данных
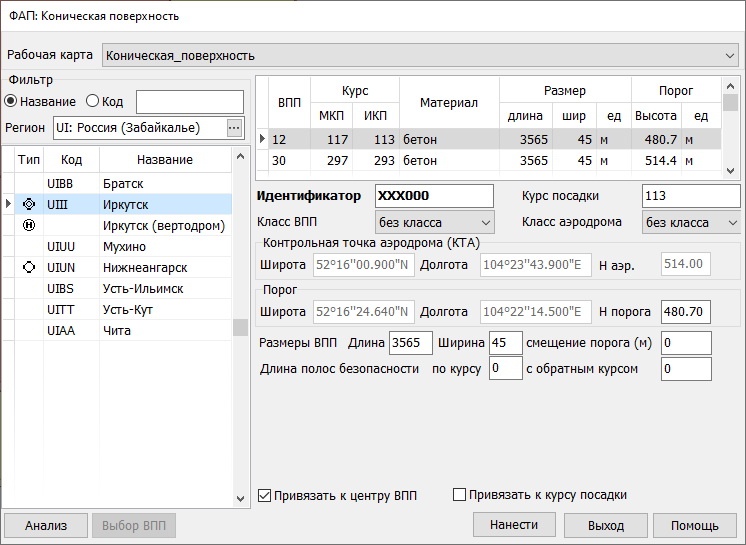
Масштаб планов выбирается с учетом особенностей конкретного аэродрома, в частности: количество и длина ВПП, количество препятствий и плотность их расположения. Во всех случаях масштаб должен быть не менее 1:100 000 для внешней горизонтальной поверхности и 1:50 000 для внутренней горизонтальной, конической, захода на посадку и переходной поверхностей. Анализ влияния препятствий выполняется в соответствии с пунктом 3 приложения 3.5 МОС ФАП. Результаты расчёта экспортируются в виде таблицы препятствий пункта 3 акта обследования препятствий. Форма настройки параметров плана ограничения и устранения препятствий (коническая поверхность) отображена на рисунке ниже. В верхней части размещено поле с выбором рабочей карты. На рабочую карту наносится текущий план. В левой части формы размещена таблица аэродромов с фильтром по наименованию, коду и региону ИКАО. Перед началом работы следует выбрать нужный регион ИКАО в фильтре аэродрома и исследуемый аэродром. Необходимая информация об аэродроме переносится с базы данных в редактируемые поля, а при её отсутствии поля заполняются вручную. Правая часть формы разделяется на таблицу курсов посадки и область ввода параметров. В автономном режиме таблица курсов посадки не отображается.
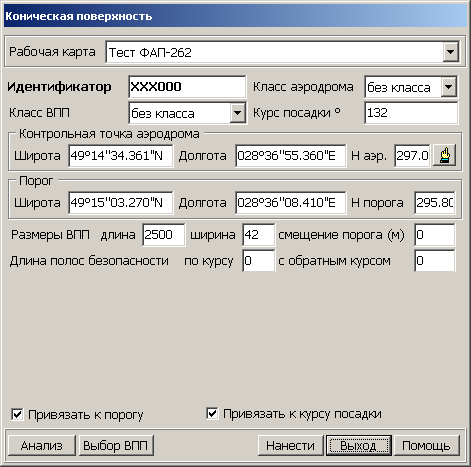
Поле Идентификатор — служит для произвольной текстовой маркировки поверхностей плана. Текстовый маркер устанавливается оператором и служит в качестве индикатора для различия планов при нанесении в многополосном аэродроме, а также для поиска при анализе влияния препятствий. Поле Класс аэродрома — предназначено для выбора исследуемого класса аэродрома. По умолчанию класс переносится из базы данных и не имеет обратной связи с базой данных. Поле ВПП — предназначено для выбора исследуемого класса взлётно-посадочной полосы. Поле автоматически заполняется при выборе другого аэродрома и не имеет обратной связи с базой данных. Поле Курс посадки — предназначено для установки значения истинного курса посадки аэродрома. Значение поля автоматически заполняется при выборе другого курса и не имеет обратной связи с базой данных. В автономном режиме работы с отключенной базой данных форма имеет такой же вид, за исключением таблицы выбора аэродрома и курсов посадки.
Форма ввода параметров конической поверхности с отключенной базой данных
Поле Контрольная точка аэродрома — предназначено для установки широты, долготы и высоты аэродрома вручную или автоматически. Автоматическая установка значений выполняется только в режиме с подключённой базой данных, а значения широты долготы и высоты не подлежат ручной коррекции. В автономном режиме поля доступны для коррекции. Поле Порог — предназначено для установки широты, долготы и высоты исследуемого порога ВПП. В режиме с подключённой базой данных информация о метрике порога переносится из базы данных без обратной связи и не подлежат ручной коррекции. Размеры ВПП (м) — длина и ширина искусственной поверхности ВПП, участвующей при расчёте плана.
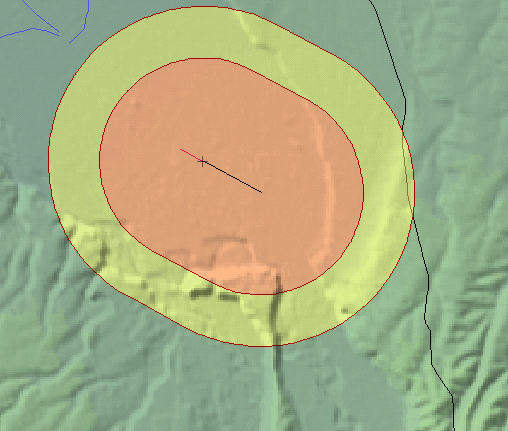
Коническая поверхность на карте
Смешение порога - служит для установки начала системы координат для смещённых порогов ВПП относительно координаты, указанной в поле Порог в направлении, указанном в поле Курс посадки. Длина полос безопасности (м) - длина концевых полос безопасности в метрах вдоль продолжения оси ВПП. Кнопка Выбор ВПП предназначена для выбора объекта карты в качестве оси ВПП. Кнопка Анализ вызывает форму поиска и анализа планов на карте с признаком «план конической поверхности». |