Сохранение маршрутов полётов в базу данных |




|
|
Сохранение маршрутов полётов в базу данных выполняется через временную таблицу. Структура временной таблицы полностью повторяет структуру постоянной таблицы манёвров, объединённую с таблицей маршрутов. Вся информация в таблице разграничена между пользователями АНИ и не подлежит протоколированию в подсистеме безопасности данных. Разделение информации позволяет создать индивидуальные рабочие пространства для проектировщика схем. При запуске задачи таблица временных маршрутов содержит только ту информацию, которую создавал и проектировал текущий пользователь АНИ. Форма работы с временной таблицей находится на второй закладке формы "Кодирования маршрутов". Сохранение информации в постоянные таблицы выполняется кнопкой "Сохранить".
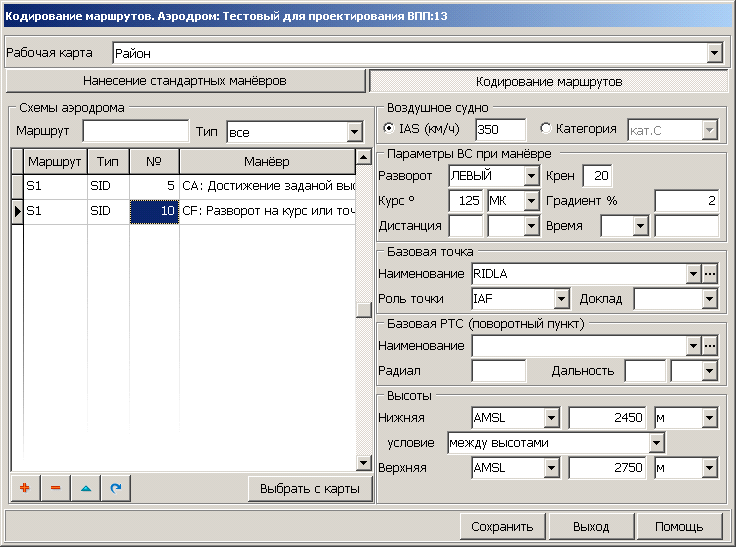
Форма редактирования временной таблицы маршрутов:
С левой стороны формы расположены основные поля временной таблицы, доступной для редактирования. Навигатором в нижней части формы добавляются, обновляются или удаляются записи. В верхней части размещен фильтр по типу и маршруту. Коррекция наименования, выбор типа маршрута, порядкового номера и вида манёвра осуществляется непосредственно в таблице. В нижней части размещена кнопка "Выбрать с карты". Кнопка активна при наличии хотя бы одной записи в таблице и подключённой активной карте в верхней части формы. При нажатии на кнопку форма скрывается, и задача предлагает выбрать участок маршрута, созданный при кодировании схем. После выбора участка информация с объекта расшифровывается и переносится в поля таблицы в текущую строку. Технология передачи информации заключается в том, что при кодировании маршрута все базовые параметры сохраняются в виде информационной части строки ARINC в специальную семантику (номер 720). При выборе такого объекта строка считывается раскодируется и переносится в строку таблицы. Непосредственно в форме в ручном режиме изменяются параметры, которые невозможно закодировать или которые не являются обязательными для манёвра, или которые требуют дополнительной корректировки. С правой стороны расположена форма коррекции параметров манёвра. Навигационная информация о маршрутах прибытия убытия и посадки в формате ARINC поступает в бортовые вычислительные системы воздушных судов различных типов и рассчитывается для каждой конкретной модели индивидуально. При переносе в базу данных каждая схема должна быть ориентирована под конкретное воздушное судно для возможности графического отображения на карте. "Параметры ВС при манёвре" содержат следующие поля: "Разворот" – для указания стороны разворота; "Крен" – крен при развороте. Если параметр не указан, устанавливаются стандартные крены. "Курс полёта" – для каждого вида манёвра устанавливается начальный или конечный курс полёта. "Градиент %" – устанавливается на манёврах, которые предусматривают набор высоты или снижение. "Дистанция" – длина участка в маневрах, которые предусматривают этот параметр. "Время" – время полёта в пределах манёвра или его части. Используется при кодировании манёвров ожидания и обратных схем. Поле "Базовая точка" предназначено для хранения начальной и содержит поля: "Наименование" – позволяет выбирать основную точку с диалога выбора точек (см. выше по тексту). "Роль в маршруте" – содержит роль точки на этапах полёта маршрута посадки. Поле заполняется вручную. "Доклад" – тип точки. С докладом или без доклада. В маршрутах RNAV – с пролётом или без пролёта. Поле "Базовая РТС (поворотный пункт)" предназначено для хранения опорной РТС или конечной точки и содержит поля: "Наименование" – позволяет выбирать основную точку с диалога выбора точек. "Радиал" – радиал или курсовой угол радиостанции в манёврах VI, CI. "Дальность" – дальность до DME в манёврах FD, CD. Поле "Высоты" содержит информацию о манёвре в вертикальной плоскости: "Нижняя" – нижняя высота с указанием типа и единиц измерения. "Верхняя" – верхняя высота с указанием типа и единиц измерения. "условие" – условие пересечения высот. "МБВ на участке" – установленное значение минимально безопасной высоты (МБВ) на участке. МБВ рассчитывается, используя функцию "анализ препятствий". |