Use of the task «To locate photos of JPEG on map by GPS-coordinates» in the mode of "preliminary compilation" when processing a survey project obtained from UAV |



|
|
The "preliminary compilation" mode allows you to handle the project of shooting's data obtained from the UAV. The automatic binding and turn of the photo image by coordinates of the shooting point and the direction angle of the image is carried out. The mode is developed in interests of a national economy, for example, for the monitoring of pipelines, as well as in interests of power departments for reconnaissance. As a result of performing this mode the objects are put on a map: - Point objects in which semantics the reference to a image file is written down. - Linear object - a trajectory of the UAV movement. - Closed linear objects - contours of rasters. - Geo-located RSW rasters are added to the map document.
The project of the shooting's data is a text file containing a list of JPEG images with GPS coordinates of photographing's points, and a set of JPEG images. An example of UAV shooting's data project: #CoordinateSystem: GEOGCS["WGS 84", DATUM["World Geodetic System 1984",SPHEROID["WGS 84", 6378137, 298.257223563, AUTHORITY["EPSG","7030"]], TOWGS84[0,0,0,0,0,0,0], AUTHORITY["EPSG","6326"]], PRIMEM["Greenwich", 0, AUTHORITY["EPSG","8901"]], UNIT["degree", 0.01745329251994328, AUTHORITY["EPSG", "9102"]], AUTHORITY["EPSG", "4326"]] #Label X/Longitude Y/Latitude Z/Altitude File1.JPG 52.015617 55.814526 584.300000 File2.JPG 52.014664 55.814526 585.500000
ATTENTION! In dialog of choosing the source files, specify a text file of the project of shooting's data. The project file must be in the same folder with the images files that it contains. The program will automatically determine the downloaded images by the list from the text file of the shooting's data project.
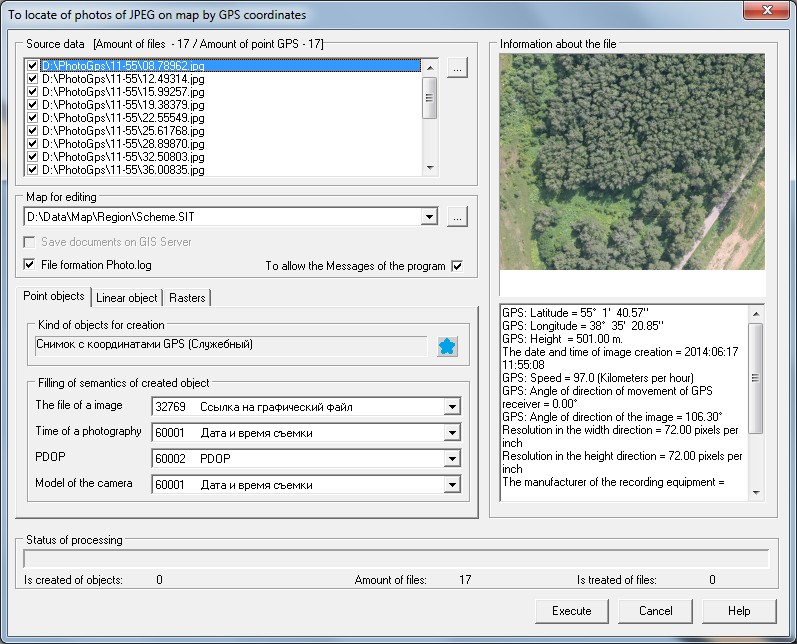
Bookmark «Point objects» As a result of mode execution onto a map the point objects are put in which semantics the reference to the image file is written down. For one photo with GPS coordinates on a map the one object is created. During execution of the mode, photos are copied into the folder \PHOTO\, that is created in the folder of an edited map.
On the bookmark «Point objects» the kind of created point objects is specified and the filled semantics are selected from the list. ATTENTION: semantics «File of image» which type should correspond to the «Filename of the registered type» is obligatory for filling.
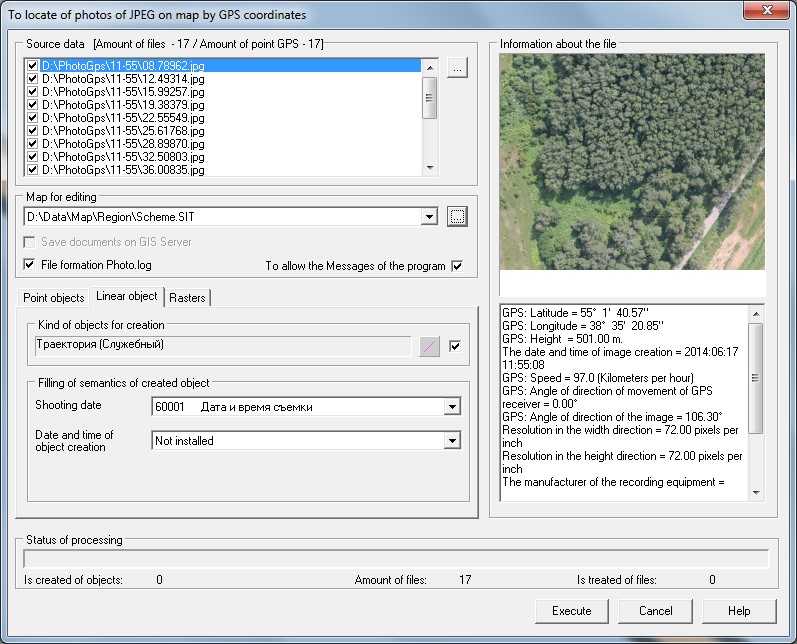
Bookmark «Linear object» As a result of mode execution onto a map the linear object is put, consistently connecting the points with GPS coordinates from processed images. For group of processed images on a map the one object is created.
On the bookmark «Linear objects» the kind of created line object is specified and the filled semantics are selected from the list.
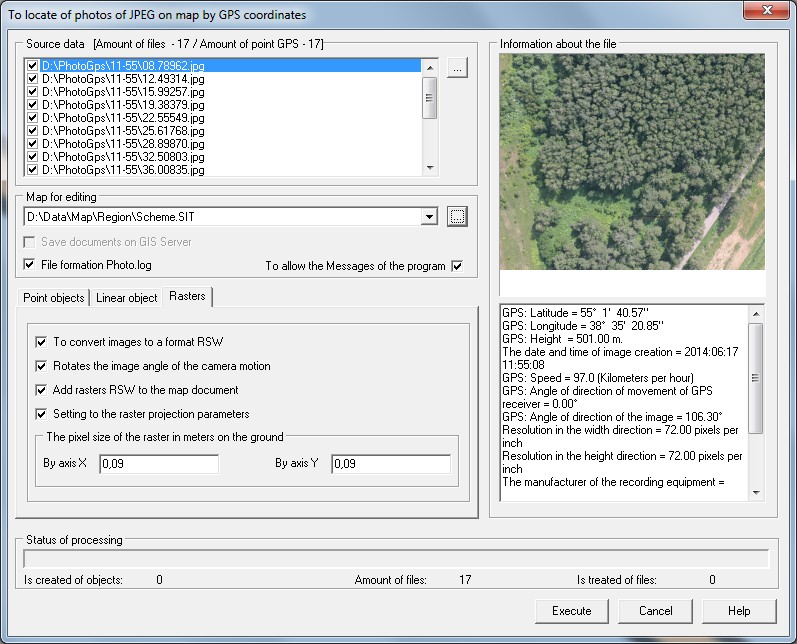
Bookmark «Rasters» The «Rasters» bookmark enables the conversion of JPEG images to RSW files with possible image rotation by the direction angle of the image specified in the corresponding EXIF tag of the source file. The downloaded rasters RSW receive a geo-binding and are added into the map document.
The pixel size of the raster in meters on the terrain is set by the operator in accordance with the technical characteristics of the equipment installed on the UAV, and the shooting's conditions. |